 扫一扫,手机浏览
扫一扫,手机浏览- 技术文章
电动执行机构原理
2017-08-17 15:20:11 来源:1电动执行机构的工作原理
电动执行机构包括伺服放大器及执行机构两大部分,其中执行
机构又分为电机、减速器及位置发送器三大部件
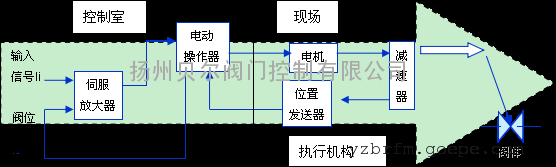
来自调节器的电流信号Ii(4-20mA)作为伺服放大器的输入,与阀的位置反馈信号If进行比较,当输入信号和反馈信号比较差值不等于零时,其差值经伺服放大器放大后,控制两相伺服电机按相应的方向转动,再经减速器减速后使输出轴产生位移;同时,输出轴位移又经位置发送器转换成阀的反馈信号If;当反馈信号与输入信号相等时,伺服放大器无输出,电机不转动,执行机构就稳定在与输入信号相应的位置上。电动执行机构的输出轴位移和输入信号成线性关系。
电动执行机构有连续调节、远程手动控制和就地手动操作三种控制方式。
1.1电动执行机构就地调节方式
电动执行机构需就地手动操作时,当电动操作器切换开关放置“手动”位置,把电机端部旋钮拨到“手动”位置,拉出执行机构上的手轮,摇动手轮就可以实现手动操作。当不用就地操作时,千万要注意,把电机端部的旋钮拨到“自动”位置,并把手轮推进。
1.2电动执行机构远程遥控调节方式
当电动操作器切换开关放在“手动”位置时,即处在手动远程控制状态,操作时只要将旋转切换开关分别拔到“开”或“关”的位置,带动电机正转或反转,执行机构输出轴就可以实现上行或下行动作,在运动过程中观察电动操作器上的阀位开度表,到所需控制阀位开度时,立即松开切换开关即可。
1.3电动执行机构自动调节方式
当电动操作器切换开关放在“自动”位置时,即处在自动调节状态,其控制过程如下:
当输入信号Iλ1=0(或4mA DC)时,位置发送器反馈电流I反=0(或4mA DC) ,此时伺服放大器没有输出电压,电机停转,执行机构输出轴稳定在预选好的零位;
当输入信号Iλ1>0(或4mA DC)时,此输入信号与系统本身的位置反馈电流在伺服放大器的前置级磁放大器中进行磁势的综合比较,由于这二个信号大小不相等且极性相反就有误差磁势出现,从而使伺服放大器有足够的输出功率驱动电机,执行机构输出轴就朝着减少这个误差磁势的方向运动,直到输入信号和位置反馈信号二者相等为止,此时输出轴就稳定在于输入信号相对应的位置上。
2电动执行机构的组成分为电机、减速器及位置发送器三大部件
2.1电机
电机是接受伺服放大器或电动操作器输出的开关电源,把电能转化为机械能,从而驱动执行机构动作。
2.2减速器
减速器上有手动部件、输出轴、机械限位块。减速器是将电机的高转速、小转矩转换为低转速、大转矩的输出功率,以带动阀门机构动作。机座上有两块刹车片,可使输出轴的转角限制在90°范围内以保证不损坏调节机构及有关连杆。
2.3位置发送器
位置发送器由电源变压器、差动变压器、印刷电路板等部件组成。
当减速器输出轴移动时,凸轮随之旋转,是压在凸轮斜面上的差动变压器的铁芯连杆产生轴向位移,改变铁芯在差动变压器线圈中的位置,使差动变压器输出对应位置的电压转换成标准的直流电流信号(4~20mA)。减速器输出轴的转角位移与位置发送器的输出电流呈线性关系。
3 伺服放大器的原理
在自动控制系统中,这些执行机构需要外挂式的伺服放大器进行开关控制。电动执行机构的指令信号与阀位反馈信号在伺服放大器中进行比较放大后,经过可控硅送出220V的开关信号。伺服放大器是由电器元件组成的电子线路板构成,分前置级磁放大器线路板、触发器线路板、可控硅交流开关线路板三部分。电动执行机构的指令信号与阀位反馈信号的比较放大靠这些电子线路板的运行来实现。
伺服放大器有两种模式可供选择:
一种为执行机构本身的控制板上带有伺服放大器功能,结构紧凑,不需占有仪表盘后空间,安装及调试较为简单(即电子一体化)。
另一种为单独放置的位置定位器,安装于仪表盘后,这是一种较为传统的应用方法,检修及更换较为容易(即分立式比例调节型)。
伺服放大器是电动执行机构的控制单元仪表,可分为墙挂式和架装式两种。放大器的前置板包括信号的隔离、比较、极性的判别、故障诊断等功能。主回路板上有两路交流开关,电源变压器及直流稳压电源。前置板安装在主回路板上。它接受调节仪表的标准信号(4-20mA)和执行机构的反馈信号,输出220V交流电驱动伺服电动机正转、反转,连续调节阀位开度。实现各种工艺过程参数自动调节。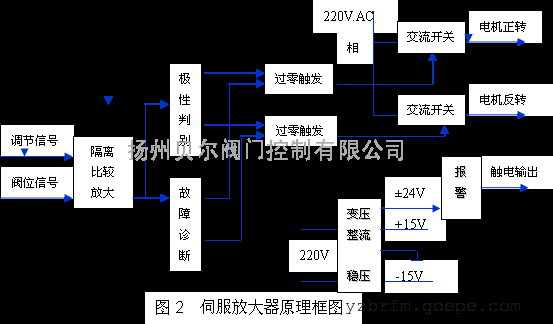
4结束语
在日常维护中我们发现,电动执行机构的故障多发于伺服放大器故障。而伺服放大器是由电器元件组成的电子线路板构成,电子元件的质量和电路板的可靠性决定了伺服放大器的可靠性。常规伺服放大器抗干扰的能力普遍不高,电压的波动、高温、高粉尘、振动等外部环境的影响都容易导致伺服放大器故障。针对伺服放大器存在可靠性差的缺点,建议利用DCS来实现伺服放大器的控制功能。因为DCS具有灵活的组态方法、丰富的软件功能和很高的可靠性,可自动判断执行机构的状态,当固态继电器击穿或者阀位反馈信号有误时能够使电动执行机构保持在原位置,以防止事故的扩大化。而且在可靠性方面有了很大程度的提高。
上一篇:阀门的主要性能参数下一篇:手动阀门改电动阀门方案新发布 -
-
江苏贝尔阀门控制有限公司
主导产品:DZW多回转阀门电动装置、DQW部分回转阀门电动装置、精小型电动执行器械、智能型一体化电动执行器、角行程电动执行机构、成套电动阀门。










